DBSCAN группирует точки по плотности. Точка является core, если в ее -окрестности находится как минимум точек. Кластеры формируются из всех точек, достижимых по плотности, а точки, не относящиеся ни к одному кластеру, помечаются как шум. Метод не требует заранее задавать число кластеров и хорошо выделяет плотные области и выбросы.
Используемые библиотеки¶
Используем numpy, seaborn, matplotlib. Из sklearn — реальный датасет load_digits, StandardScaler, PCA, DBSCAN, silhouette_score, adjusted_rand_score.
import numpy as np
import seaborn as sns
import matplotlib.pyplot as plt
from sklearn.datasets import load_digits
from sklearn.preprocessing import StandardScaler
from sklearn.decomposition import PCA
from sklearn.cluster import DBSCAN
from sklearn.metrics import silhouette_score, adjusted_rand_score
sns.set_theme(style="whitegrid", palette="deep")
plt.rcParams["figure.dpi"] = 120
HEATMAP_CMAP = "coolwarm"
Датасет: описание и частичная распечатка¶
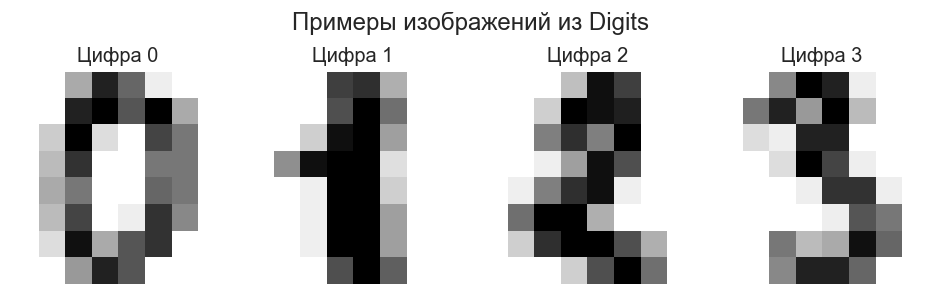
Используем реальный датасет Digits из sklearn, но берём только цифры 0, 1, 2, 3, чтобы задача оставалась наглядной и быстрой. Каждое изображение — это матрица 8×8, то есть 64 признака. Такой пример реалистичнее синтетических «лун»: точки живут в пространстве пикселей, в данных есть похожие классы и потенциальные выбросы.
digits = load_digits(as_frame=True)
data = digits.frame
data = data[data["target"].isin([0, 1, 2, 3])].reset_index(drop=True)
print(f"Размерность: {data.shape}")
data.head()
Размерность: (720, 65)
fig, axes = plt.subplots(1, 4, figsize=(8, 2.5))
for ax, digit in zip(axes, [0, 1, 2, 3]):
sample_image = (
data.loc[data["target"] == digit]
.drop(columns=["target"])
.iloc[0]
.to_numpy()
.reshape(8, 8)
)
ax.imshow(sample_image, cmap="gray_r")
ax.set_title(f"Цифра {digit}")
ax.axis("off")
plt.suptitle("Примеры изображений из Digits")
plt.tight_layout()
plt.show()
Предварительная обработка¶
Стандартизируем данные, затем уменьшаем размерность с помощью PCA. Для DBSCAN это особенно полезно на реальных изображениях: в высокой размерности расстояния становятся менее информативными, а в PCA-представлении плотностная структура читается лучше. Для кластеризации используем 8 компонент, для графиков — первые две.
features = data.drop(columns=["target"])
target = data["target"]
scaler = StandardScaler()
X_scaled = scaler.fit_transform(features)
pca = PCA(n_components=8, random_state=42)
X_pca = pca.fit_transform(X_scaled)
X_vis = X_pca[:, :2]
Тепловая карта корреляций¶
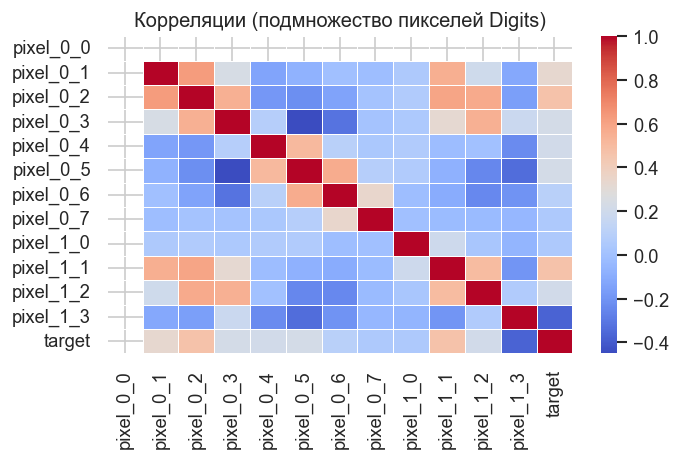
Покажем первые 12 пиксельных признаков. На реальных изображениях пиксели рядом друг с другом обычно коррелируют, поэтому данные заметно сложнее независимых синтетических координат.
plt.figure(figsize=(6, 4))
subset_cols = list(features.columns[:12])
correlation = data[subset_cols + ["target"]].corr()
sns.heatmap(correlation, annot=False, cmap=HEATMAP_CMAP, linewidths=0.3)
plt.title("Корреляции (подмножество пикселей Digits)")
plt.tight_layout()
plt.show()
Обучение модели¶
Кластеризуем данные в PCA-пространстве: DBSCAN(eps=2.5, min_samples=10). Эти параметры подобраны так, чтобы на реальном поднаборе Digits алгоритм находил несколько устойчивых плотных групп и оставлял часть неоднозначных изображений шумом. Метка -1 означает шум.
model = DBSCAN(eps=2.5, min_samples=10)
model.fit(X_pca)
Прогнозы модели¶
Выводим число найденных кластеров, долю шума и две метрики:
Silhouette Score — считаем только по точкам, не помеченным как шум;
Adjusted Rand Index (ARI) — внешняя метрика согласованности с известными цифрами, только для анализа результата.
labels = model.labels_
cluster_labels = labels[labels >= 0]
noise_ratio = np.mean(labels == -1)
if len(np.unique(cluster_labels)) > 1:
score = silhouette_score(X_pca[labels >= 0], cluster_labels)
else:
score = float("nan")
ari = adjusted_rand_score(target, labels)
print("DBSCAN on Digits")
print(f"Clusters: {len(np.unique(cluster_labels))}")
print(f"Noise ratio: {noise_ratio:.3f}")
print(f"Silhouette (без шума): {score:.3f}")
print(f"ARI: {ari:.3f}")
DBSCAN on Digits
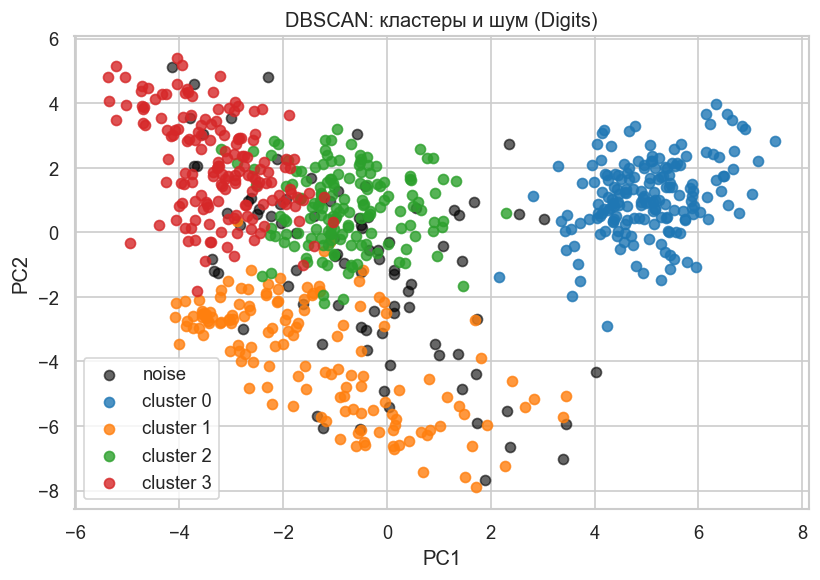
Clusters: 4
Noise ratio: 0.122
Silhouette (без шума): 0.394
ARI: 0.742
Графики выходных результатов¶
Scatter-график в пространстве первых двух главных компонент. Каждый цвет — найденный кластер, шум — чёрный. На реальных изображениях часть точек может выпадать в шум: для DBSCAN это не ошибка, а способ явно отметить неоднозначные или редкие объекты.
unique_labels = np.unique(labels)
colors = sns.color_palette("tab10", n_colors=max(len(unique_labels) - (1 if -1 in unique_labels else 0), 1))
color_idx = 0
plt.figure(figsize=(7, 5))
for label in unique_labels:
mask = labels == label
if label == -1:
plt.scatter(
X_vis[mask, 0],
X_vis[mask, 1],
c="black",
alpha=0.6,
label="noise",
)
else:
plt.scatter(
X_vis[mask, 0],
X_vis[mask, 1],
color=colors[color_idx],
alpha=0.8,
label=f"cluster {label}",
)
color_idx += 1
plt.title("DBSCAN: кластеры и шум (Digits)")
plt.xlabel("PC1")
plt.ylabel("PC2")
plt.legend()
plt.tight_layout()
plt.show()